Valve has released a new version of SteamOS, and it’s a relevant one for Steam Deck owners who have been bothered by the level of noise that the handheld can generate. Among the new features introduced in SteamOS 3.2 is an all-new OS-controlled fan curve, a change to the standard fan behavior that Valve says will result in a quieter-running system. Some reports have indicated that this option could result in increased GPU temperatures of as much as 10°C, but users who are alarmed at this can always switch back to the old fan curve in the settings menu. Other new features introduced by the SteamOS 3.2 update include a slider for adjusting in-game screen refresh rates on the fly, various new options (e.g., more internal screen resolutions and maximum volume settings), and full support for Remote Play Together sessions, a Steam benefit that enables local multi-player games with friends over the internet for free.
Refresh Rate
Players now have the option to adjust the in-game screen refresh rate on the fly. The default is 60Hz (which can be frame-limited to 60, 30, and 15fps), but you can now slide it down to 40Hz (with frame limits at 40, 20, and 10fps). Or any number (integer) between those two settings. This feature is great for finding that perfect balance between framerate, game quality, and battery life. Pro-tip, we have found that 40Hz tends to be a sweet spot for responsiveness, consistency, and smoothness*. And of course, you can save this setting on a per-game basis.Fan Behavior
The team has been hard at work on Steam Deck’s fan behavior, and this update has an all-new OS-controlled fan curve. This means that overall it’s smarter, more responsive to what’s happening on and inside Steam Deck, and quieter – especially in low usage situations. This has been tested extensively, and we’re continuing to work on improvements – so please let us know what you think. If you prefer the way the fan used to work, you can always switch back to the old (BIOS-controlled) fan behavior in System Settings.Other bits and bobs
SteamOS 3.2 also includes more internal screen resolution options for games to choose from, quick formats for microSD cards, and audio improvements – max speaker volume now goes even higher!Big thanks to the community for helping us test all these changes in the OS Beta channel. For more info about this update, view the full patch notes here.
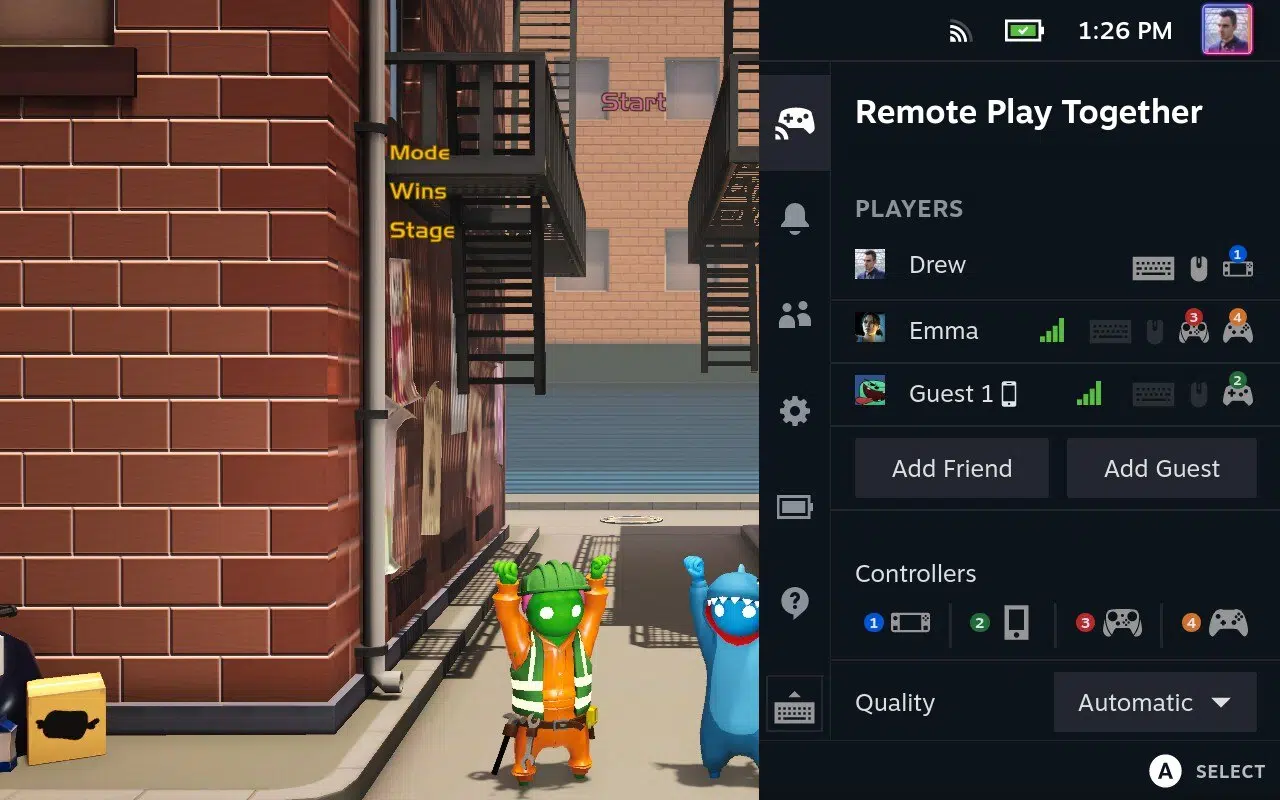
Remote Play Together
This feature isn’t actually part of the SteamOS 3.2 update (it’s a Steam Client update), but it’s still a big deal, and is also something that we shipped today. Remote Play Together (the feature that allows a friend to join your game remotely as if they are sitting on a couch next to you) is now completely functional on Steam Deck. This includes both hosting and joining Remote Play Together sessions. Try out a supported game and open the Quick Access Menu to get started. Details about this, and all the other Steam Client updates can be found here.
Source: Valve